Its a simple fact that two years ago the Omex “solution” for running the K20 was incomplete at best and hopeless at worst.
The ECU was just not designed to handle it - does not make it a bad system, just the wrong one for the application. Closed loop VTC is IMO essential so don’t give it up unless you really have to.
At the time there was much bleating along the lines of “no it fine, it does everything perfectly” then when proven it became “well it doesn’t matter”, but it does matter as the OP is finding out but then the guys selling the solution are hardly likely to point out the massive great holes are they?
Emphasis is on two years ago - maybe by now Omex have a better solution? Getting your hands on that and getting it mapped properly (and the map on elise-r, which is the same that you think you have, is a stinker and no amount of fan boy bleating is going to change that objective fact) might be a far cheaper solution that trying to get across to hondata or some other ECU even though Dans point about the other advantages of the hondata based solution are true.
I have the first car in the UK converted to K20 and spent a lot of time looking at management options then and even then had to plead with MoTeC to let me have their VTC control software (first public application) as at the time nothing else bar hondata did it properly so I know exactly what the management system had to be capable of and went through every option in detail and the OMEX just didn’t do it I am afraid. Glossy sales patter may say otherwise but that’s just the truth of it.
Currently running Clockwise EFi solution as it made sense as Ian is a genius and the cars running his roller ITBs so all made sense, just like the MoTeC though its hardly a daily drive friendly solution.
If I end up with a charger (very likely at some point) I would probably go with a eliseparts hondata solution - proven in very many cars, many thousands of hours mapping time and expertise available and also, as Dan says, a pretty civilised drive considering.
Two companies who have explained how they use both the cam sensors for the closed loop VTC have been Hondata (via Wayne @ essex and the guys at TDI) and Tour De Force who have a custom firmware specifically for the K20A.
Regarding driving the dash, I might take the opertunately to do a general electrics refresh and move to a digidash, so I can see the tacho and monitor oil stats.
Suffice to stay, it can stay omex until I know I can get it done properly. Going to book it in for an hour to get the situ assed.
Just found this thread - I’ve recently had my Omex / Phoenix conversion mapped by Paul at TDI North (Warrington)
It was the 1st Omex (710) he’d worked on, so he was a bit apprehensive to do it, but when he looked at the mapping software he commented that it was very similar to the AEM package he was familiar with, and that it wasn’t too suprising as they are both derived from GEMS
He also noted that the hondata was a more ‘sophisticated’ map than the Omex as it had mapping points making it effectively a 4D map not a 3D one
Never the less, he mapped mine and its running very nicely with no cold start problems - although it never did have any, so that may not be down to him just a feature of the original 2008 map
There are a few on here that may remember being chased down by a black s1 elise at the NORLOG trackday on Friday - I’m sure they can testify how well the engine pulls
Ok, as I understand it (sure plenty of people can correct any mistakes):
K20A has 60 degrees of variable cam timing, going under the name of VTC. It’s what the i in iVTEC is for, and as is separate from the lift function.
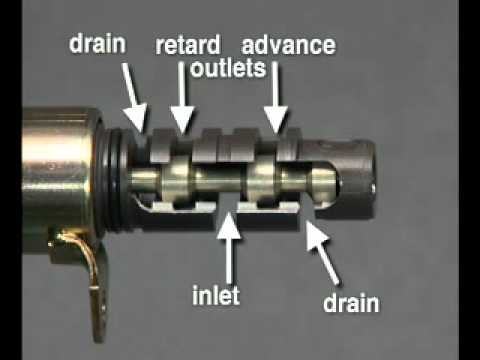
Thats a VTC cam puley, and it has 4 chambers with a star in the middle.
Then there is a valve which can send oil to either side of the star in the chambers, to vary its position in the overall pulley.
If you look at how the Omex (and other open loop systems) control cam timing is by two tables: RPM vs Angle and Angle vs PWM. So 4500rpm = 35deg = 40% Duty. Trouble is oil pressure is a moving value, and as the engine state changes, 40% PWM might no longer = 35 deg, so it needs feed back. K20A has two sensors on the side to get feedback on where the exhaust (locked) and inlet (variable) are and crucially how much advance is dialed in. Better EMS use both these sensors to trim the feed to the VTC control valve to achieve the desired advance.
Now on mine, the Angle to PWM table was set to a flat 50% across the lot. So not a lot of use, and I am unsure if the VTC actuator is even wired up. Think there is some useful mid range power to be had in there. Will get it dyno’d before and after the install of the new EMS, and eat my words if it’s not better.
The Omex has full closed loop control, always has had and it’s used to maintain the cam position within one degree of timing at all times. I have no idea who says it is open loop only (which is completely pointless on a continuously variable system) but they clearly have absolutely no idea how our software works if they believe so and therefore should not be making comments about it. Whoever wrote the description above does not understand our software at all. The table they refer to is the basline table that HAS to have a starting point somewhere and it was set to 50% duty cycle. This actual value is not that important and varies between systems, for instance most Ford VCTi uses about 40% and the Renault equivalent uses 60%. All this means is that at idle, with typical oil and temperature that the swing from one extreme position to the other (ie fully advanced to fully retarded) happens around that value. Then there is another table that is an instantaneous correction with no hysteresis and no time delay. That table is the error table that looks at the target cam position versus actual position and changes the pwm duty cycle to try to correct. Then there is a further set of options that look still at the remaining error and use a PID closed loop to bring the remaining error back into line. We would normally expect to see an error of less than 0.5 degrees in steady speed state and no more than 1 degree under high engine acceleration rates. If they had actually looked at the target position (Valve 1 or 2 position) versus the actual position (seen in parameter CAM1 or CAM2 ADV) then they would have seen it correct.
Which stable would I find said horse? Twice I’ve called Omex regarding this and both times I have been referred to two different 3rd parties, neither of whom had comprehensive K20 knowledge or would even comment on closed loop VTC. I’m pretty sure mine has no VTC! (see pix, cam sensor cables not hooked in)
Omex 710 Man on VVC - Not a lot mentioned in the docs for the 710, just to call omex, which as mentioned I have done. The reply above is far more useful, why cant they put that in the docs?
TBH this is the very reason why myself & 99.9% owners of Honda powered Exiges/Elises use the Hondata ECU - simply, it works, & there are numerous places spread throughout the UK where bespoke mapping can be carried out.
Absolutely nowt wrong with the Omex ECU - provided you get someone who knows how to map it!
[quote=Mr Pesky]TBH this is the very reason why myself & 99.9% owners of Honda powered Exiges/Elises use the Hondata ECU - simply, it works, & there are numerous places spread throughout the UK where bespoke mapping can be carried out.
Absolutely nowt wrong with the Omex ECU - provided you get someone who knows how to map it! [/quote]
I’m about to start an S1 Honda conversion. The engine will be standard N/A with the exception of the exhaust which will be a 4-2-1 system with no CAT and not much silencing. Where in Yorkshire could I get the ECU conversion done and the car rolling-road mapped?